Pages
Categories
Archives
Meta
Goal Stack Planning
Posted in: Intelegensia Semu by wahyudi on March 28, 2014
Goal Stack Planning atau yang juga dikenal sebagai Linear Planning (karena bersifat linear) adalah teknik untuk memecahkan suatu tujuan dengan menggunakan stack. Dengan menggunakan stack yang berisi goal/tujuan dan operator yang telah dipilih untuk memenuhi tujuan tersebut.
Contoh aplikasi goal stack planning adalah the block world, lengan robot yang bekerja memindahkan block
Dalam the block world terdiri dari operator dan predicate:
Predicate:
- ON(A,B) – Block A berada di atas block B
- ONTABLE(A) – Block A berada di table/meja
- CLEAR(A) – Di atas block A tidak terdapat block lain
- HOLDING(A) – lengan holding/memegang block A
- ARMEMPTY – lengan kosong(tidak memegang block apapun)
Operator:
- STACK(A,B) – Menumpuk block A di atas block B. Dengan kondisi awal HOLDING(A) dan CLEAR(B)
- UNSTACK(A,B) – Mengambil block A dari atas block B. Dengan kondisi awal ARMEMPTY dan CLEAR(A)
- PICKUP(A) – Mengambil block A dari atas meja dan memegangnya. Dengan kondisi awal ARMEMPTY dan CLEAR(A)
- PUTDOWN(A) – Menaruh block A di atas meja. Dengan kondisi awal HOLDING(A)
Contoh Soal:
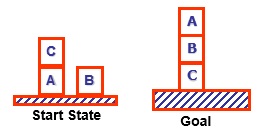
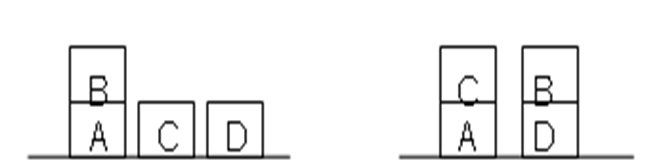
state diurutkan dari kiri bawah:
start state: ONTABLE(A) ∧ ON(C,A) ∧ CLEAR(C) ∧ ONTABLE(B) ∧ CLEAR(B) ∧ ARMEMPTY
goal state: ONTABLE(C) ∧ ON(B,C) ∧ ON(A,B) ∧ CLEAR(A) ∧ ARMEMPTY
-
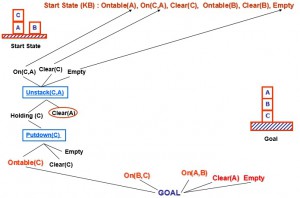
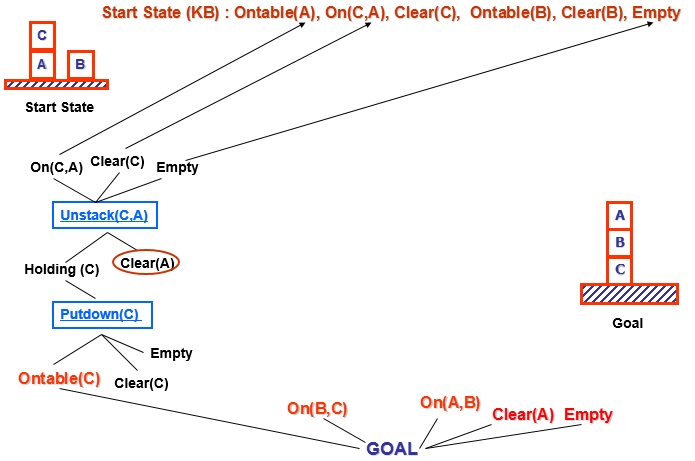
Step pertama adalah menentukan operator apa yang dipakai untuk mendapatkan state kiri bawah goal(ONTABLE(C)). Di atas setiap operator merupakan pre condition sebelum operator dijalankan, sedangkan di bawahnya post condition setelah operator dijalankan. Setelah itu cocokkan pre condition teratas dengan start state. 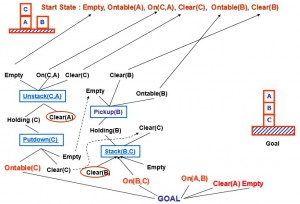 Clear(C) dan Empty merupakan pre dan post condition yg saling berhubungan, maka dapat dihubungan dengan garis panah
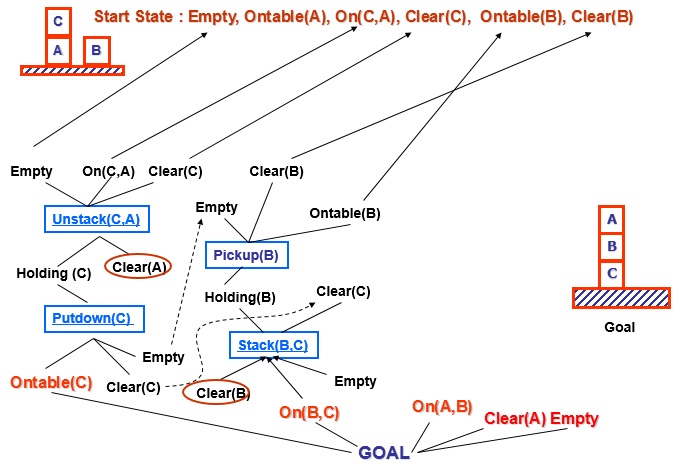
Clear(C) dan Empty merupakan pre dan post condition yg saling berhubungan, maka dapat dihubungan dengan garis panah
putus-putus. Sedangkan Clear(B) dan Clear(A) tidak memiliki pasangan post conditionnya, maka kita tandai dengan oval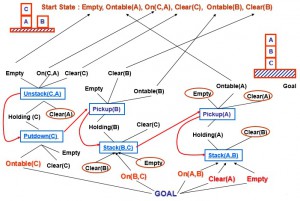 Ketika sudah selesai, maka kita hubungkan semua operator mulai dari kiri atas. Itulah langkah-langkah untuk mengubah urutan start state menjadi goal state
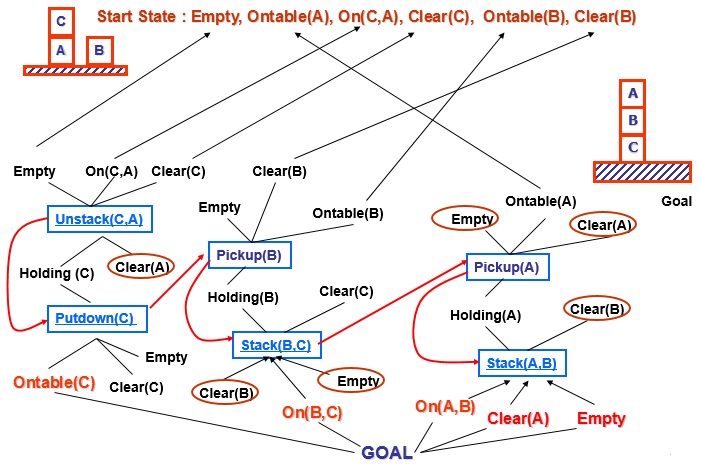
Ketika sudah selesai, maka kita hubungkan semua operator mulai dari kiri atas. Itulah langkah-langkah untuk mengubah urutan start state menjadi goal state
First Order Logic
Posted in: Intelegensia Semu by wahyudi on March 22, 2014
Dalam propotional logic, diasumsikan world berisi fakta. Sedangkan dalam first order logic, diasumsikan world berisi:
- Objek : hal-hal yang berhubungan dengan identitas individu, misalnya : manusia, rumah, teori-teori, warna, mobil, dan lain-lain.
- Relasi : hubungan antara satu benda dengan benda lainnya, misalnya: lebih besar dari, lebih kecil dari, memiliki, terjadi setelah, dan lain-lain.
- Fungsi: merupakan subset dari hubungan di mana hanya ada satu “nilai” untuk setiap “input” yang diberikan, misalnya: ayah dari, teman baik, dan lain-lain.
Simbol logic standart:
- ∀: semua
- ∃: sebagian
- ⇒: implikasi (jika … maka …)
- ⇔: biimplikasi (jika dan hanya jika)
- ¬: negasi
- ∨: disjungsi (atau)
- ∧: konjungsi (dan)
First order logic memiliki 2 bagian penting, syntax dan semantik. Syntax merupakan ekspresi berisi simbol-simbol logika, sedangkan semantik adalah makna dari ekspresi tersebut.
Atomic sentence = predicate (term1, … , termn) atau term1 =term2
- Contoh: Joni adalah saudara Doni. Ekspresinya: saudara(Joni,Doni)
Complex Sentence = dibuat dari atomic sentence menggunakan konektivitas
- Contoh: Semua besi adalah logam. Ekspresinya: ∀x:besi(x)⇒logam(x)
Untuk melakukan pembuktian suatu ekspresi benar atau salah, kita diberi banyak ekspresi (biasanya masih dalam bentuk kalimat yang kemudian diubah menjadi ekspresi first order logic) yang masih berkaitan. 2 teknik untuk pembuktian tersebut adalah backward chaining dan resolusi
Hello world!
Posted in: Uncategorized by wahyudi on March 20, 2014
Welcome to Binusian blog.
This is the first post of any blog.binusian.org member blog. Edit or delete it, then start blogging!
Happy Blogging 🙂